Optionen
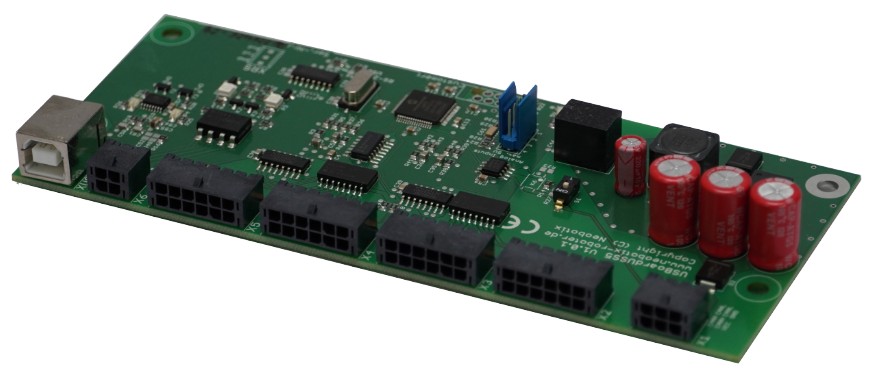
USBoard
Das USBoard erlaubt die Auswertung von bis zu 16 Ultraschallsensoren durch die Steuerungssoftware des autonomen Roboters. Dadurch lassen sich zum Beispiel Kollisionen mit Hindernissen oberhalb der Detektionsebene der Laserscanner verhindern.
Es sind mehrere Versionen des USBoards im Angebot, die alle auch als eigenständiges System genutzt werden können.
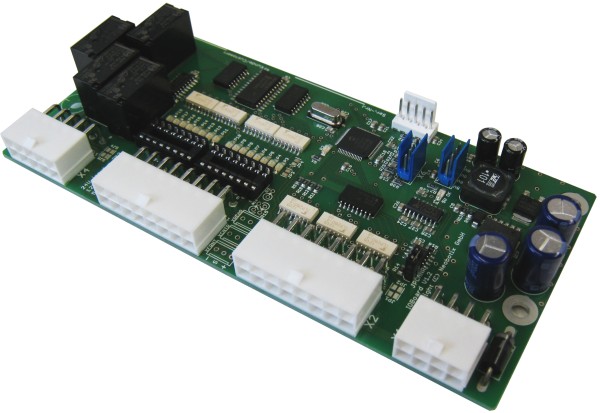
IOBoard
Das IOBoard erweitert die Möglichkeiten des mobilen Roboters oder des mobilen Manipulators, indem es 16 digitale Eingänge, 12 digitale Ausgänge, 4 Relaisausgänge und 4 Analogeingänge zur Verfügung stellt. Alle diese Anschlüsse können frei belegt und durch die Robotersteuerung kontrolliert werden.

Laserscanner - nanoScan3
Der Laserscanner nanoScan3 von Sick wird in den mobilen Robotern der ROX-Serie und in den mobilen Manipulatoren EMROX verbaut und bietet auf kleinstem Bauraum maximale Funktionalität. Optional kann er auch in anderen Robotern eingesetzt werden oder zusätzlich integriert werden, um besondere Schutzfunktionen zu realisieren.

Laserscanner - S300
Alle unsere älteren Roboter sind standardmäßig mit einem Laserscanner S300 Expert (2 m) von Sick ausgestattet. Bei vielen Modellen kann optional ein zweiter Laserscanner angebaut werden, um den Sichtbereich zu vergrößern oder sogar eine vollständige Abdeckung rund um den Roboter zu erhalten.
Im Sichtfeld der Laserscanner können Schutzfelder definiert werden. Sobald ein Hindernis in diesen Schutzfeldern erkannt wird, wechselt der Roboter in den sicheren Stopp.

Laserscanner - microScan3
Der microScan3 von Sick ist der moderne Nachfolger des bewährten S300. Er besitzt eine größere Reichweite und setzt neue Maßstäbe hinsichtlich der Messdatenqualität. Mit bis zu 9 m Schutzfeldreichweite bietet der microScan3 die größte Reichweite unter allen Sicherheitslaserscannern in unserem Standardprogramm.
Anders als der S300 muss der microScan3 immer mit einer Sicherheitssteuerung Flexi Soft kombiniert werden.

Sicherheitssteuerung Flexi Soft
Bei größeren und komplexeren Robotern, vor allem bei mobilen Manipulatoren, ist der Einsatz einer Sicherheitssteuerung wie der Flexi Soft von Sick sinnvoll. An die Flexi Soft können fast beliebige Sicherheitskomponenten angeschlossen werden. Deren Zusammenspiel lässt sich anschließend frei programmieren und genau an den jeweiligen Einsatzfall anpassen. In vielen Anwendungen ist ein sicherer Betrieb autonomer Roboter sonst gar nicht möglich.