ROX-Trike

Die ROX-Plattform mit frontseitigem Differentialantrieb
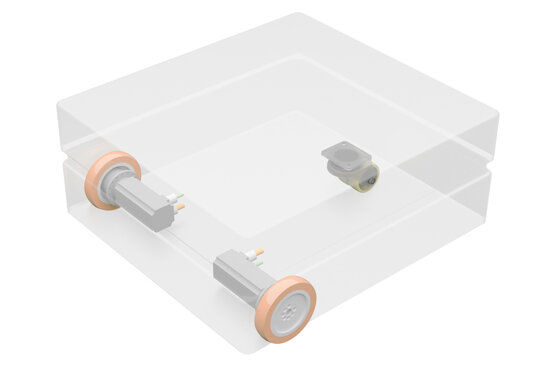
Der frontseitige Differentialantrieb ist die mechanisch schlichteste und neben dem mittigem Antrieb wohl die bei AMR gängigste Kinematik. Er besteht aus zwei einzeln angesteuerten Antriebsrädern, die ohne Federung in den beiden vorderen Ecken der Plattform montiert sind und einen Großteil der Last tragen. Eine oder zwei passive Lenkrollen am Heck des Roboters vervollständigen das Fahrwerk. Der ROX-Trike besitzt üblicherweise zwei Lenkrollen, was ihm eine hohe Stabilität und Traglast verleiht und auf den meisten Industrieböden ein sehr gutes Fahrverhalten bietet. Nur bei sehr unebenen Untergründen kann es unter Umständen sinvoll sein, nur eine einzige Lenkrolle zu verwenden, damit der Bodenkontakt immer eindeutig definiert ist.
Dieser Antrieb bietet einige Vorteile:
- Die Dreirad-Kinematik ist die günstigste Antriebslösung.
- Der Roboter ist sehr stabil und bietet vor allem im Stand eine sehr hohe Bodenhaftung - ideal für Arbeiten mit großen Querkräften wie etwa schnelle Armbewegungen.
Dem gegenüber stehen einige Einschränkungen:
- Der Roboter benötigt einen deutlich größeren Wendekreis als zum Beispiel der ROX-Diff. Dadurch ist er für sehr enge Umgebungen nicht ideal geeignet.
- Durch die asymmetrische Konstruktion ergibt sich eine klare Vorzugsfahrtrichtung. Rangieren und Zielanfahrten erfordern etwas mehr Vorplanung.
ROX-Trike
Simpel & flink
Weitere Informationen
Konfigurieren Sie Ihren Roboter
ROX-Trike
Basiskonfiguration
Beschreibung
Schlüsselfertiges System: 2x Motoren, 1x Sick S300 Expert-Scanner, versiegelte Bleibatterie 24V/50Ah, drahtloser Joystick, manuelles Ladegerät, Bordcomputer (Intel i5, 8 GB RAM, >200 GB SSD, WLAN), ROS, Dokumentation, CE-Konformitätserklärung
1 Tag Schulung
Beschreibung
In Heilbronn für bis zu 3 Personen
inklusive Verpflegung
inklusive Verpflegung
Basis-Support
Beschreibung
3 Monate Support (Telefon/E-Mail)
Automatische Ladestation
i7-Bordrechner
Beschreibung
Intel Core i7, 16 GB RAM, 400+ GB SSD
IOBoard
Zweiter Laserscanner
Erweiterter Support
Beschreibung
Weitere 6 Monate Unterstützung
per Telefon/E-Mail/Update
per Telefon/E-Mail/Update