Das Robot Operating System - ROS
Das Robot Operating System, besser bekannt als ROS, ist ein quelloffenes Framework für autonome Roboter aller Art. International arbeitet eine riesige Gemeinschaft von Robotik-Entwicklern daran, sowohl das ROS-Framework selbst immer weiter zu verbessern, als auch neue Funktionen, Pakete und Module zu erstellen.
ROS hat sich zum wohl am weitesten verbreiteten Standard für die Ansteuerung autonomer Roboter entwickelt. Nachdem es ursprünglich vor allem von reinen Forschern und Hochschulen eingesetzt wurde, hat es mittlerweile auch seinen Platz im kommerziellen Einsatz gefunden. Unsere ROS Dokumentation finden Sie hier.
Aktuell unterstützen wir die ROS Distribution Noetic.

Immer up to date
ROS lebt vom ständigen Austausch der Entwicklergemeinde. Innerhalb des Frameworks lassen sich die einzelnen Nodes schnell austauschen, so dass alle Neuerungen sofort genutzt werden können. Das gilt für neue Sensoren ebenso wie für grundlegende Funktionen wie etwa die Umgebungskartenerstellung oder die dynamische Pfadplanung.
Da Komponentenhersteller, Systemintegratoren, Forschungsinstitute und private Entwickler alle Ihren Teil zu ROS beitragen, steht eine unglaubliche Fülle an Möglichkeiten in Form von Open Source Paketen frei zur Verfügung. Die meisten Forscher nutzen ROS als Ausgangspunkt, um kostbare Entwicklungszeit zu sparen, und stellen ihre Ergebnisse dann wiederum der ROS-Community zur Verfügung. So bleibt ROS immer aktuell und die beste Möglichkeit, Zugriff auf die neuesten Entwicklungen zu haben.
Natürlich beteiligt sich auch Neobotix an den Entwicklungsarbeiten und ist auf GitHub und ros.org vertreten.
Volle Unterstützung für Neobotix Hardware
ROS ist ein Kernbestandteil aller Produkte von Neobotix. Sowohl komplette mobile Roboter als auch einzelne Komponenten können unter ROS verwendet werden.
Wir liefern unsere Roboter immer mit einer stabilen ROS-Basisinstallation aus. Diese umfasst natürlich alle Treiber aber auch bewährte Pakete für die Erstellung der Umgebungskarte, die Lokalisierung und die Pfadplanung.
Die Einzelkomponenten, wie etwa das USBoard, können nahtlos in die Roboter integriert werden. Alternativ können Sie die jeweiligen Nodes aber auch separat betreiben oder nach Belieben in Ihr eigenes Projekt einbinden.
Schnelle Tests dank detaillierter Simulation
Wenn Sie Ihr Projekt vorplanen möchten oder einzelne Softwaremodule offline entwerfen und testen wollen, steht Ihnen dazu unsere umfangreiche Simulation zur Verfügung.
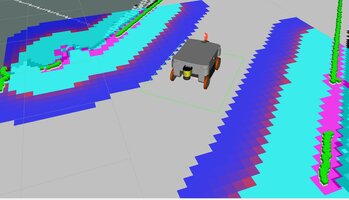
Außer den reinen 3D-Robotermodellen enthalten die Simulationen auch Testumgebungen und ein vorkonfiguriertes und einfach anzupassendes Navigationspaket. Sie können alle Sensordaten simulieren, daraus Karten erstellen und den Roboter virtuell auf Tour schicken.
So erhalten Sie einen guten Einblick in das Fahrverhalten unserer Roboter, können ausprobieren, wie sie auf verschiedene Bedingungen oder Hindernisse reagieren, und eigene Änderungen testen.

Online testen im ROS Development Studio
Das ROS Development Studio bietet eine einfache Möglichkeit, unsere Roboter unter ROS zu testen und einen Eindruck von ihren Möglichkeiten und der Bedienung zu bekommen.
Für erste Tests ist ein Gastzugang perfekt geeignet und bietet viele Vorteile:
- Kostenlos Neobotix-Roboter ausprobieren
- Keine langwierige Installation von ROS
- Kein Client nötig - einfach im Webbrowser arbeiten
- Viele hilfreiche Tutorials und Online-Kurse
ROS, ROS 2 und die "Nine Dots" ROS Logos sind Schutzmarken der Open Source Robotics Foundation.