ROX-Diff
Die ROX-Plattform mit mittigem Differentialantrieb
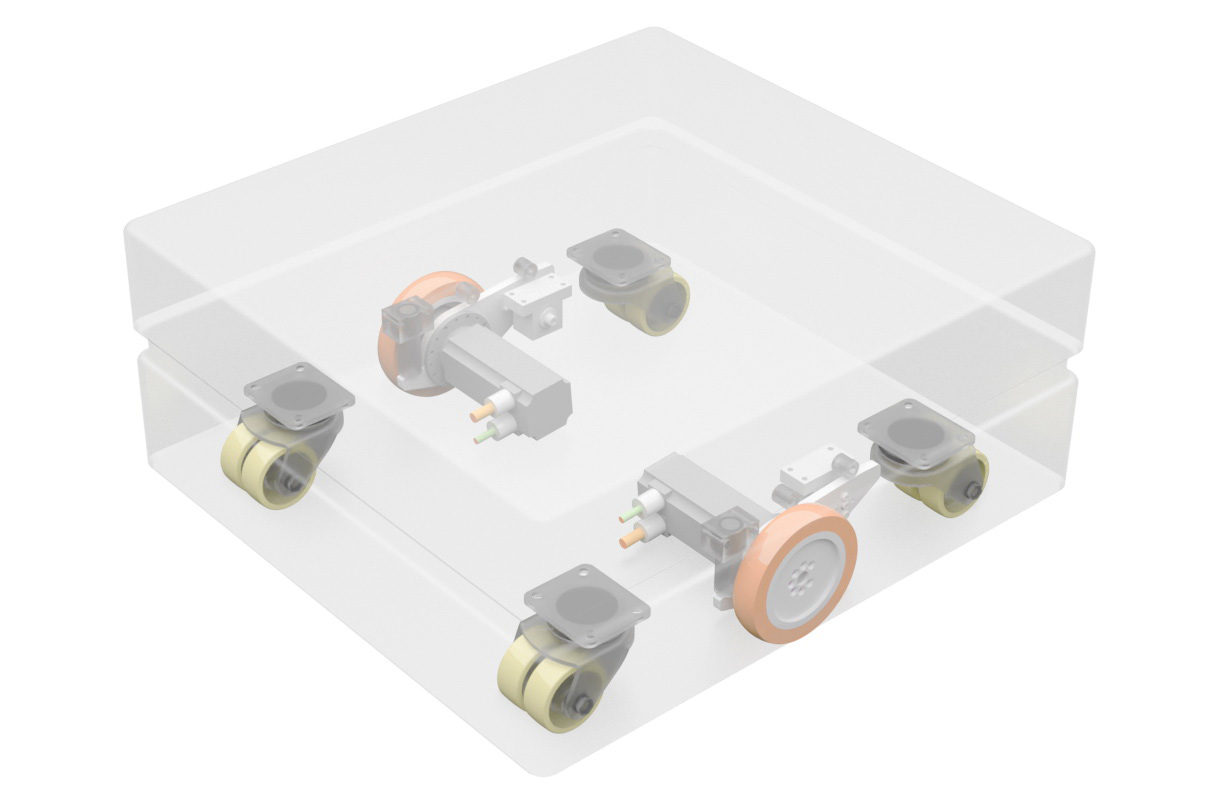
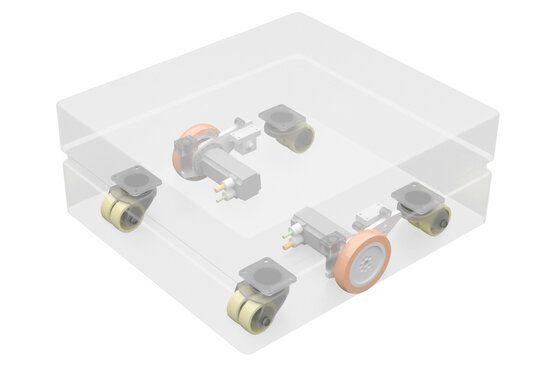
Der mittige Differentialantrieb gehört zu den bei AMR am weitesten verbreiteten Kinematiken, zusammen mit dem Dreirad-Aufbau. Er besteht aus zwei einzeln angesteuerten Antriebsrädern, die gefedert links und rechts der Plattformmitte aufgehängt sind. Die eigentlich Last wird von passiven Lenkrollen getragen, im Falle des ROX je einer an jeder Ecke der Plattform.
Aus dieser Konfiguration ergeben sich mehrere Vorteile:
- Diese Antriebsart ist sehr kosten- und energieeffizient.
- Die Fähigkeit, auf der Stelle zu wenden, verleiht dem Roboter eine hohe Beweglichkeit auch in beengten Umgebungen.
- Durch die Federung kann der Roboter auch kleine Stufen und Spalten überwinden und kommt mit fast allen Industrieböden gut zurecht.
Dem gegenüber stehen nur wenige Einschränkungen:
ROX-Diff
Agil & preiswert
Weitere Informationen
ROX-Diff
Basiskonfiguration
Beschreibung
Schlüsselfertiges System: 2x Motoren, 1x Sick S300 Expert-Scanner, versiegelte Bleibatterie 24V/50Ah, drahtloser Joystick, manuelles Ladegerät, Bordcomputer (Intel i5, 8 GB RAM, >200 GB SSD, WLAN), ROS, Dokumentation, CE-Konformitätserklärung
1 Tag Schulung
Beschreibung
In Heilbronn für bis zu 3 Personen
inklusive Verpflegung
inklusive Verpflegung
Basis-Support
Beschreibung
3 Monate Support (Telefon/E-Mail)
Automatische Ladestation
i7-Bordrechner
Beschreibung
Intel Core i7, 16 GB RAM, 400+ GB SSD
IOBoard
Zweiter Laserscanner
Erweiterter Support
Beschreibung
Weitere 6 Monate Unterstützung
per Telefon/E-Mail/Update
per Telefon/E-Mail/Update