Neobotix PlatformPilot
Der Neobotix PlatformPilot ist eine Komplettlösung für die Umsetzung Ihrer Automatisierungswünsche. Als Pilot der Roboterplattform macht er aus mobilen Robotern Autonome Mobile Roboter (AMR) und steuert sie sicher und schnell an ihr Ziel. Dabei vereint er die intelligente Steuerung der Aktoren mit der Verarbeitung der Sensordaten und bietet Navigation und Lokalisierung für viele Transportsysteme. Für den industriellen Alltag gibt es viele zusätzliche Module, um komplexe Abläufe zu automatisieren.
Für einen Eindruck der Funktionen haben wir ein Video auf unserem Youtubekanal zur Verfügung gestellt.
Sie möchten ein Angebot oder weitere Informationen?
Rufen Sie uns an oder kontaktieren Sie uns per Mail.

Für wen ist PlatformPilot geeignet?
Mit PlatformPilot können sowohl Endanwender und Integratoren von Automatisierungsapplikationen im Bereich Intralogistik die volle Leistungsfähigkeit ihrer Hardware nutzen, als auch Forscher individuelle Ansätze integrieren und erproben. Zusammen mit (Neobotix) Roboterplattformen lässt sich z. B. Material aufnehmen und automatisch transportieren oder es können integrierte Roboterarme in Position gebracht werden. Die PlatformPilot-GUI ist für Inbetriebnehmer und Maschineneinrichter optimiert und erlaubt es, die zur Einrichtung nötigen Arbeitsschritte strukturiert und in kurzer Zeit durchzuführen.
Was ist das Besondere an PlatformPilot?
Das Besondere ist der modulare Aufbau. PlatformPilot kann viele verschiedene Kinematiken, Antriebssysteme und Sensoren ansteuern und auswerten. Alle Module zusammen ergeben ein ganzheitliches System zur Steuerung und Navigation. Es ist einfach, einzelne Module auszutauschen oder zu verbessern, ohne das Gesamtsystem zu gefährden oder grundlegend zu verändern.
Das Neobotix Roadmap-Konzept
Das bewährte Konzept der Neobotix Roadmaps macht den Umstieg von bisherigen Systemen leichter. Klassische spurgeführte fahrerlose Transportsysteme (FTS) sind oft unflexibel in der Routenwahl. Änderungen der Fahrspur sind nur mit kostenintensiven Änderungen in der Umgebung zu bewerkstelligen.
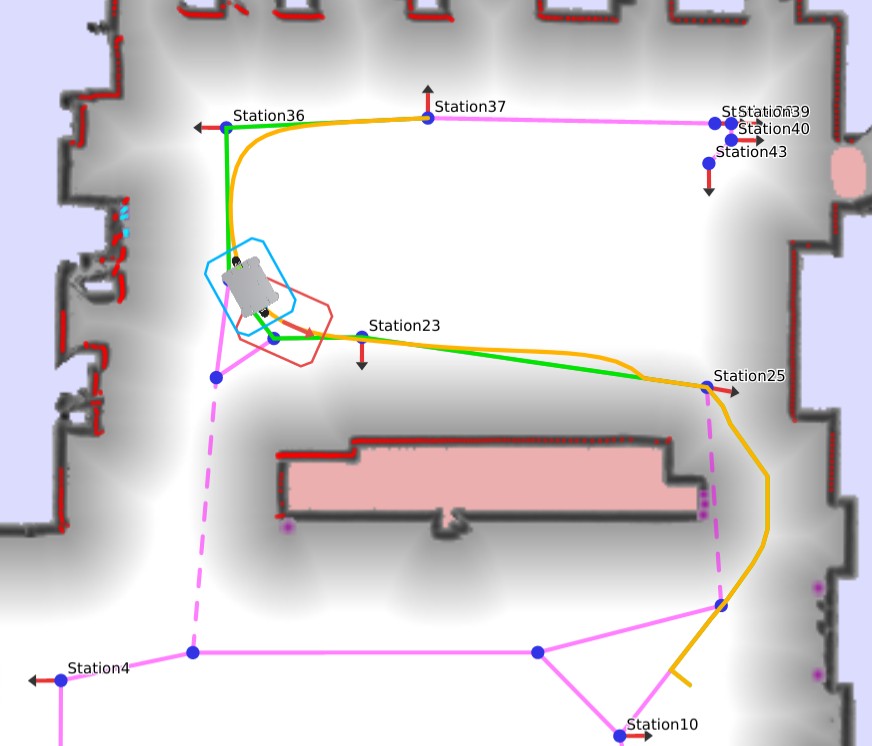
Im Neobotix PlatformPilot ist dieser Prozess virtualisiert, das heißt die Fahrspuren können dynamisch in einer grafischen Oberfläche als Pfade auf Basis einer Umgebungskarte erstellt und bearbeitet werden. Zusätzlich können Eigenschaften für jedes Pfadsegment festgelegt werden, um das Fahrverhalten detailliert anzupassen. Auf diese Weise lassen sich Geschwindigkeitsbegrenzungen, Ausweichgrenzen, Winkel oder zusätzliche Aktionen definieren. Das Fahrverhalten ist so immer vorhersehbar und reproduzierbar – unerlässlich für zuverlässige Taktzeiten.
Unsere PlatformPilot-Komponenten

Dies ist der Steuerungskern von PlatformPilot, der direkt auf dem Bordrechner des mobilen Roboters läuft.

Die grafische Bedienoberfläche erlaubt die Interaktion mit dem Roboter. Zur Einrichtung steht eine plattformübergreifende Desktop-Anwendung mit großem Funktionsumfang zur Verfügung, für einen schnellen Überblick eignet sich die eingebaute Web-Oberfläche.

Der PlatformPilot-Editor ist ein intuitives und gleichzeitig mächtiges Programmierwerkzeug, dass Zugriff auf alle Funktionen von PlatformPilot bietet und in die grafische Bedienoberfläche integriert ist.

Natürlich bringt PlatformPilot auch eine integrierte Hilfefunktion, eine umfangreiche Online-Dokumentation, viele Videotutorials und auf Wunsch auch persönliche Schulungen mit.
Optionale Zusatzkomponenten zu PlatformPilot

PlatformPilot-Tower übernimmt die Verkehrssteuerung, wenn sich mehrere autonome mobile Roboter im gleichen Arbeitsraum bewegen. Je nach Ausbaustufe greift er verschieden stark in die Routenplanung der Roboter ein, verhindert Staus und löst Blockaden auf.
Wann nehme ich welche AMR-Steuerung?
Wann ist PlatformPilot ideal?
Wenn der Roboter langfristig und produktiv arbeiten soll, vor allem wenn die Anwendung perspektivisch ausgebaut werden soll.
Wenn bewährte Funktionen und Komponenten zu einem neuen Ganzen kombiniert werden sollen.
Wenn Zuverlässigkeit und professioneller Support im Vordergrund stehen.
Wenn nicht jedes Detail zugänglich und modifizierbar sein muss.
Wann eignet sich ROS 2?
Wenn Sie die volle Kontrolle über den Software-Stack benötigen.
Wenn Ihre Anwendung innovative Fähigkeiten erfordert (modernste KI, komplexe Manipulation, kundenspezifische Sensoren).
Wenn Sie Hardware von verschiedenen Herstellern in ein einheitliches System integrieren müssen (Interoperabilität).
Wenn Innovation und Forschung im Vordergrund stehen und Sie Zugang zum modernsten Open-Source-Ökosystem benötigen.