Mobiler Manipulator MMO-500
Der mobile Manipulator MMO-500 kombiniert unseren omnidirektionalen Mecanum-basierten Roboters MPO-500 mit einem kollaborativen Roboterarm, zum Beispiel von Elite Robots oder Universal Robots.
Dank seiner Mecanum-Rädern kann sich der MMO-500 übergangslos in jede Richtung bewegen und den integrierten Roboterarm problemlos in alle Richtungen schwenken. Ohne aufwändiges Rangieren und kinematische Beschränkungen kann so der Arbeitsraum des Armes ganz erheblich vergrößert werden.
Der MMO-500 kann die Roboterarme aller wichtigen Hersteller tragen. Aufgrund seiner großen Grundfläche und Traglast kann der MMO-500 sogar den starken EC612 von Elite Robots einsetzen, der Lasten bis zu 12 kg handhaben kann.
Plattform und Arm können über das Open-Source-Software-Framework ROS 2 angesteuert werden. Für industrielle Anwendungen kann PlatformPilot mit der herstellereigenen Armsteuerung kombiniert werden.
Die gesamte MMO-500 Dokumentation und eine umfassende ROS-Simulation finden Sie in unserer umfangreichen Online-Dokumentation.
Sie möchten ein Angebot oder einen Roboter bestellen?
Rufen Sie uns an oder schreiben Sie uns eine E-Mail.

FEATURES
Direkte Verbindung: Der omnidirektionale MMO-500 bringt seinen Roboterarm auf kürzestem Wege ans Ziel, ohne Rangieren und ohne Umwege.
Volle Kontrolle: Dank Mecanum-Kinematik können Arm und Plattform in einer kinematischen Kette abgebildet werden, was ganz neue Bewegungen und Funktionen ermöglicht.
Individuell: Der mobile Manipulator MMO-500 kann völlig individuell an die verschiedensten Anforderungen angepasst werden.
Zusätzlich bieten wir viele interessante Optionen an.
TECHNISCHE DATEN
Abmessungen & Gewichte
Traglast
80 kg (Plattform)
bis zu 25 kg (Arm)
Arm
Elite Robots, Universal Robots
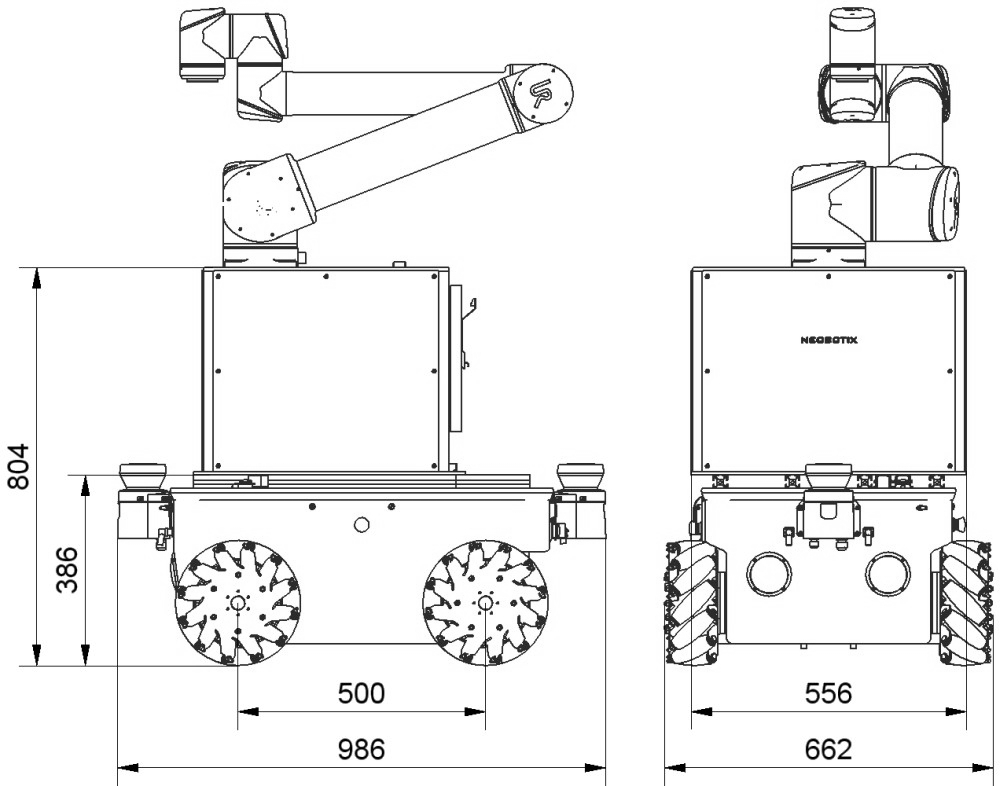
Länge x Breite x Höhe
986 x 662 x 804
Geschwindigkeit
<0,8 m/s
Laufzeit
ca. 5 h
Komponenten
Sensoren
1-2 x 2D-Laserscanner
ABMESSUNGEN